
Humanoids Can’t Get Too Far Without Softness
It’s often argued that we build humanoids because the world is built around humans. The layout of homes, factories, tools, stairs, handles, shelves, machines, and everyday objects all assume something close to the human form factor.
That argument makes sense. But it also raises a more specific question:
When we say “human form factor”, what exactly are we trying to copy?
Is it the overall height and width? The proportions? The joint ranges and degrees of freedom? The placement of cameras and sensors? The weight distribution? The friction of the hands? The texture of the skin?
Probably all of these matter. But one part is still under-discussed: the compliance, deformation, and softness of the human body.
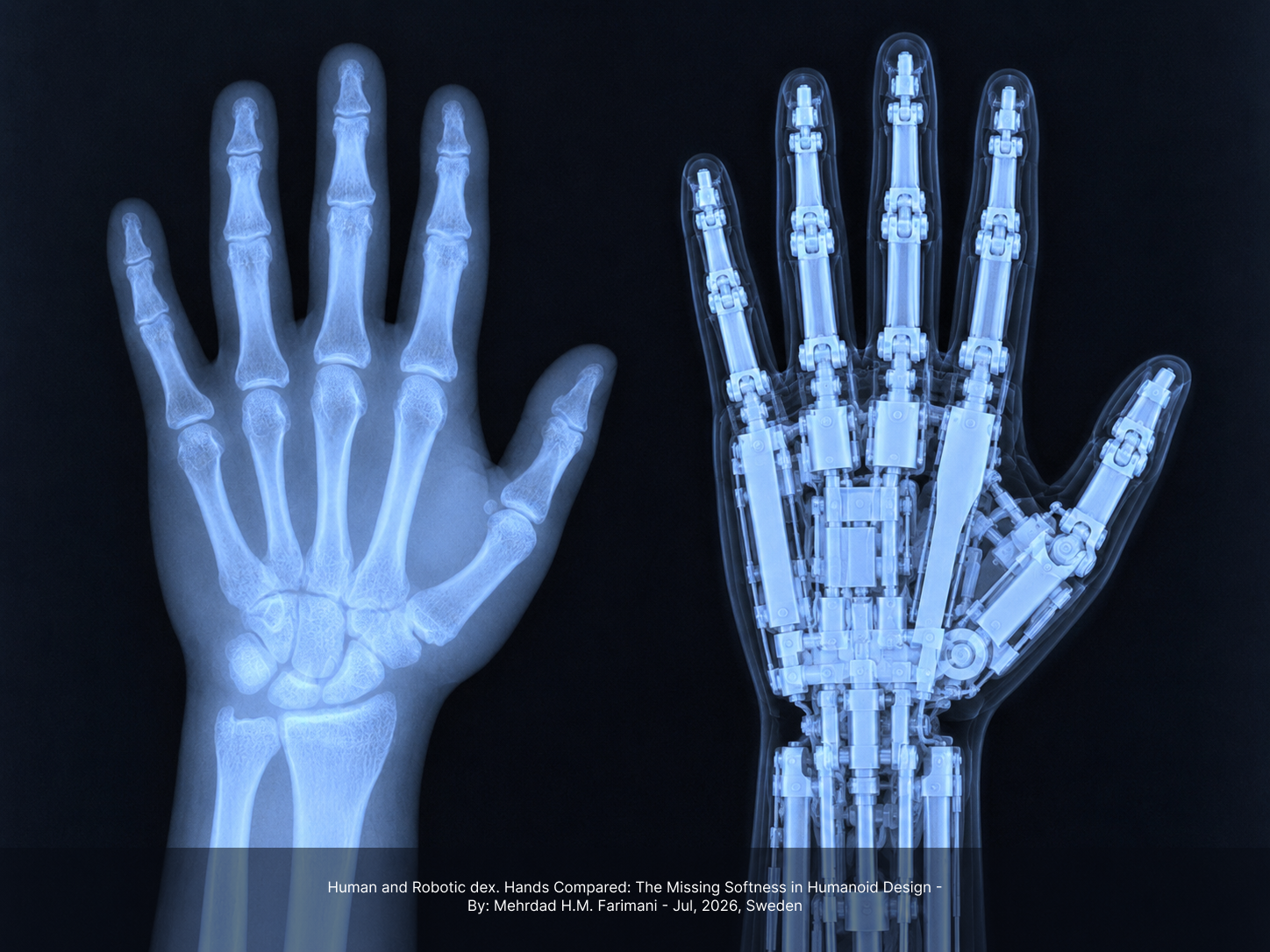
Put a human arm under X-ray, MRI, or CT scan and look at the ratio between the rigid structure and the soft structure. Bones are only one part of the system. Around them, there is muscle, fat, skin, fascia, tendons, fluids, and a lot of material that deforms, absorbs, adapts, and distributes force.
Now imagine putting a typical humanoid arm under the same scan. You would probably see a very different ratio between hard and soft components. Much more rigid structure. Much less deformation. Much less passive compliance.
I’m not arguing that we should blindly imitate nature. That is rarely a good engineering strategy. But when we say the world is designed around humans, we should remember that the softness of the human body is part of that interface.
A chair is not only designed for human dimensions. It is also designed for a body that can slightly deform against it. A door handle is not only designed for a human hand shape. It is also designed for skin that creates friction and conforms around the surface. A crowded room is not only navigable because humans have legs. It is also navigable because small contacts between bodies are usually harmless.
Softness is part of how humans safely exist in human environments.
I recently saw a meme on Reddit where someone joked: “I keep scratching my car. Why don’t we make car bodies from the same material as shoes?”
Obviously, as a car design argument, this misses many technical points. Cars are heavy, fast, and deal with very high impact energies. You cannot solve that problem by simply making the outer body rubbery.
But there is some truth hidden in the joke.
Humanoids are not cars. They are not cranes. They are not industrial machines bolted to the floor. They are also not phones in protective cases. They are somewhere much closer to the scale of a human body.
That means the kind of impacts they experience, and the kind of environments they operate in, are much closer to human impact scenarios. A shoulder brushing a shelf. A knee touching a table. A hip hitting a door frame. A hand contacting a product with slightly too much force.
In those cases, softness is not decoration. It is part of the mechanical intelligence of the system.
There is another useful example from home vacuum robots.
One reason small robot vacuum cleaners work surprisingly well is that they are allowed to touch the world. They use simple sensing, simple control, and physical contact as part of navigation. The bumper is not a failure mode. It is part of the system design.
They can bump into a wall, register the contact, adjust, and continue. Nobody panics. The wall is fine. The robot is fine.
But for most other robots, especially humanoids, we treat contact with the environment as a dangerous event. We try to avoid it as much as possible. Every unexpected collision becomes a control problem, a safety problem, or a reliability problem.
What if that assumption is limiting us?
What if humanoids should be designed to touch the world much more often?
What if small collisions, brushing contacts, sliding contacts, and imperfect interactions were normal, safe, and useful?
For that to happen, the robot cannot be a stack of rigid panels moving through a human environment. It needs compliance at the interface.
Today, many humanoids are still being designed with a mindset closer to cars or industrial machines. Hard surfaces, rigid shells, clean panel gaps, solid covers, exposed structure, and very little passive deformation.
But the nature of the product is completely different.
A humanoid is supposed to work near people, furniture, tools, products, walls, shelves, cables, handles, soft objects, fragile objects, and unpredictable environments. In that world, rigid panels create three obvious problems.
First, safety. A hard robot is less forgiving. Small mistakes in perception, planning, or control become more dangerous because the contact forces are concentrated and transferred directly. Compliance gives the system more time and space to react. It reduces peak forces, spreads contact, and makes accidental interaction less severe.
Second, usability. If every contact is treated as a failure, the robot needs extremely precise perception and control before it can do useful work. That is a high bar. Humans do not operate like that. We lean, slide, bump, adjust, feel, and recover constantly. A more compliant robot can use contact as information rather than treating it only as an error.
Third, generalization. The real world is messy. Objects are not always where the model thinks they are. Materials vary. Fixtures move. Shelves bend. Handles have tolerances. Packages deform. If the robot’s body is rigid and unforgiving, every small mismatch becomes a failure case. Compliance can absorb some of that mismatch physically, before it becomes a software problem.
This is especially important in manipulation.
In hands, fingertips, palms, forearms, and even elbows, compliance can improve grip, contact stability, and force distribution. A soft surface can conform around an object, increase contact area, reduce slipping, and make dexterous manipulation more robust. This does not remove the need for sensing and control, but it reduces how perfect they need to be.
So why aren’t humanoids already much softer?
There are some obvious reasons.
The first is production. Producing soft and compliant panels that can wrap around limbs and joints is not easy. They need to follow large ranges of motion, survive repeated deformation, manage heat, remain lightweight, be cleanable, be replaceable, and still allow access to internal components. That is a hard manufacturing problem, especially with today’s rapid prototyping workflows.
The second is spacing. The inside of a humanoid is already packed with motors, gearboxes, batteries, electronics, cooling, cables, sensors, and structural parts. If we try to add 20 to 50 mm of foam, silicone, gel, or layered compliant material everywhere, the robot quickly becomes bulky. At some point, you get Baymax. Great character, difficult product.
The third is simulation. Most classic robot simulators still assume rigid bodies. That assumption is convenient, fast, and good enough for many control problems. But soft materials, flexible skins, deformable panels, and complex contact are much harder to simulate. They are compute-heavy, uncertain, and difficult to validate against the real world.
The fourth is priority. A humanoid program is already full of overlapping problems: locomotion, manipulation, perception, autonomy, safety, battery life, thermal design, manufacturing, cost, reliability, and serviceability. Adding a serious soft-body layer makes the whole project more complex and less predictable.
So it is understandable why teams avoid it.
But understandable does not mean sustainable.
If humanoids are expected to operate in real human environments, around people and objects, then rigid shells will continue to limit them. They will damage themselves, damage the environment, damage the products they handle, or require unrealistic levels of precision to avoid doing so.
The point is not that every humanoid should become soft everywhere. Some parts need to stay rigid. Some surfaces need structure. Some covers need to protect internal components. There are thermal, mechanical, and manufacturing constraints that cannot be ignored.
The point is that compliance should be treated as a core part of humanoid design, not as cosmetic padding added at the end.
Softness is not just about safety foam. It is about how the robot physically negotiates uncertainty.
A humanoid that can only operate when every contact is perfectly planned will always struggle outside controlled demos. A humanoid that can safely tolerate imperfect contact has a much better chance of becoming useful.
If the world is designed around humans, then it is also designed around bodies that are not fully rigid.
That should matter more in how we build humanoids.
Cheers