
What do I think?
We’re not just building machines. We’re shaping how they live with us.
The design of humanoid robots goes far beyond aesthetics. It touches on how they move, how safe they are around us, how we feel about them, and whether we trust them at all. A well-designed humanoid can shift a person’s reaction from fear to curiosity, from distance to connection.
This blog is where I share what I’ve learned (and what I’m still figuring out) about designing robots that fit into real human environments, not just labs or slideshows. It’s a space for insights, ideas, questions, and practical lessons. Some of it’s technical. Some of it’s about perception, behavior, and culture. But all of it comes back to one thing: how we make robots that belong in the world we actually live in.
If that’s something you care about too, you’re in the right place.
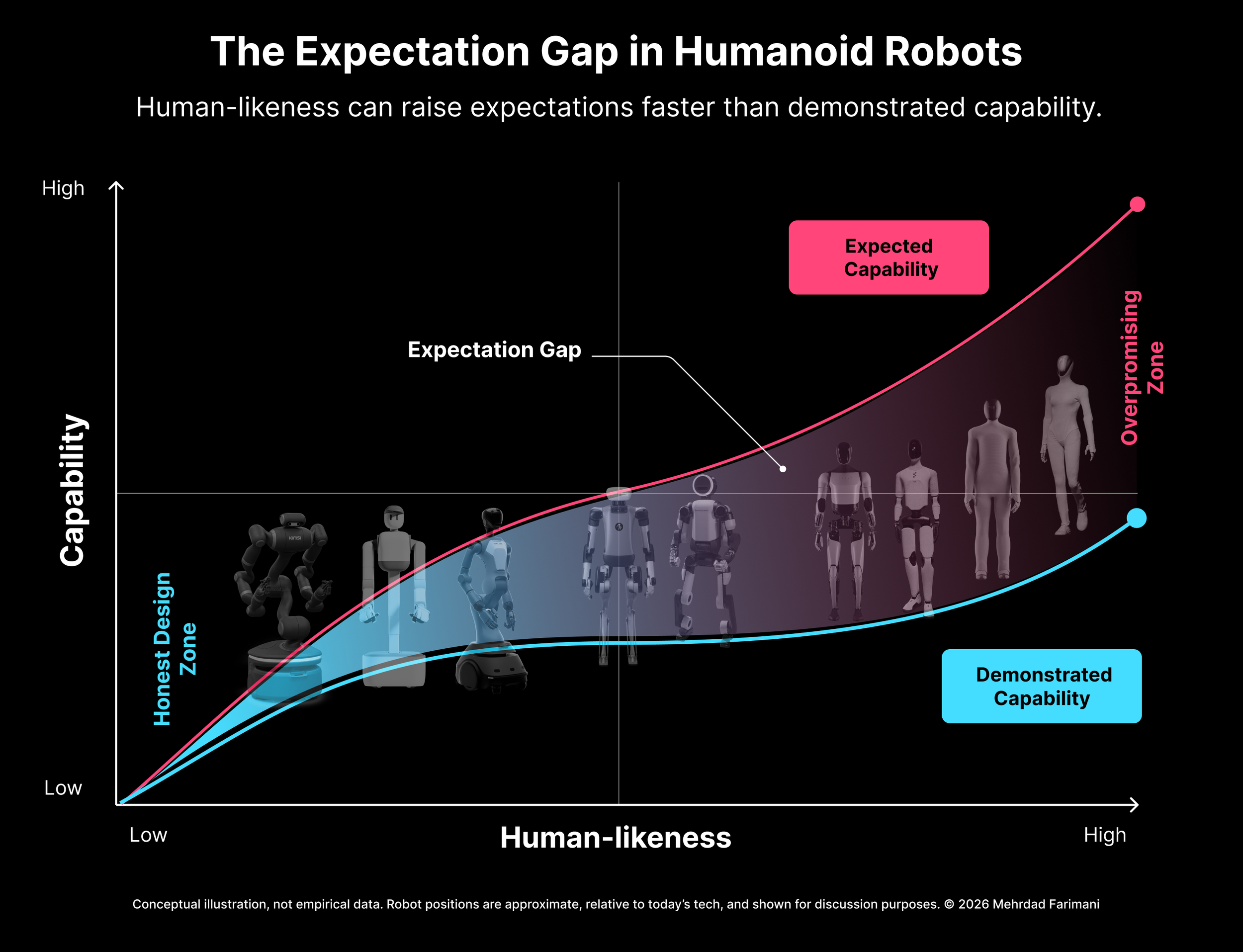
A Humanoid Robot Is Judged Against a Human, Not a Machine
As humanoid robots move toward realistic proportions, dexterous hands, expressive faces, and smoother motion, they also raise the standard by which people judge them. This article explores the expectation gap between what a robot’s appearance promises and what its technology can reliably deliver, and why humanoid companies should pursue functional human-likeness rather than maximum realism.
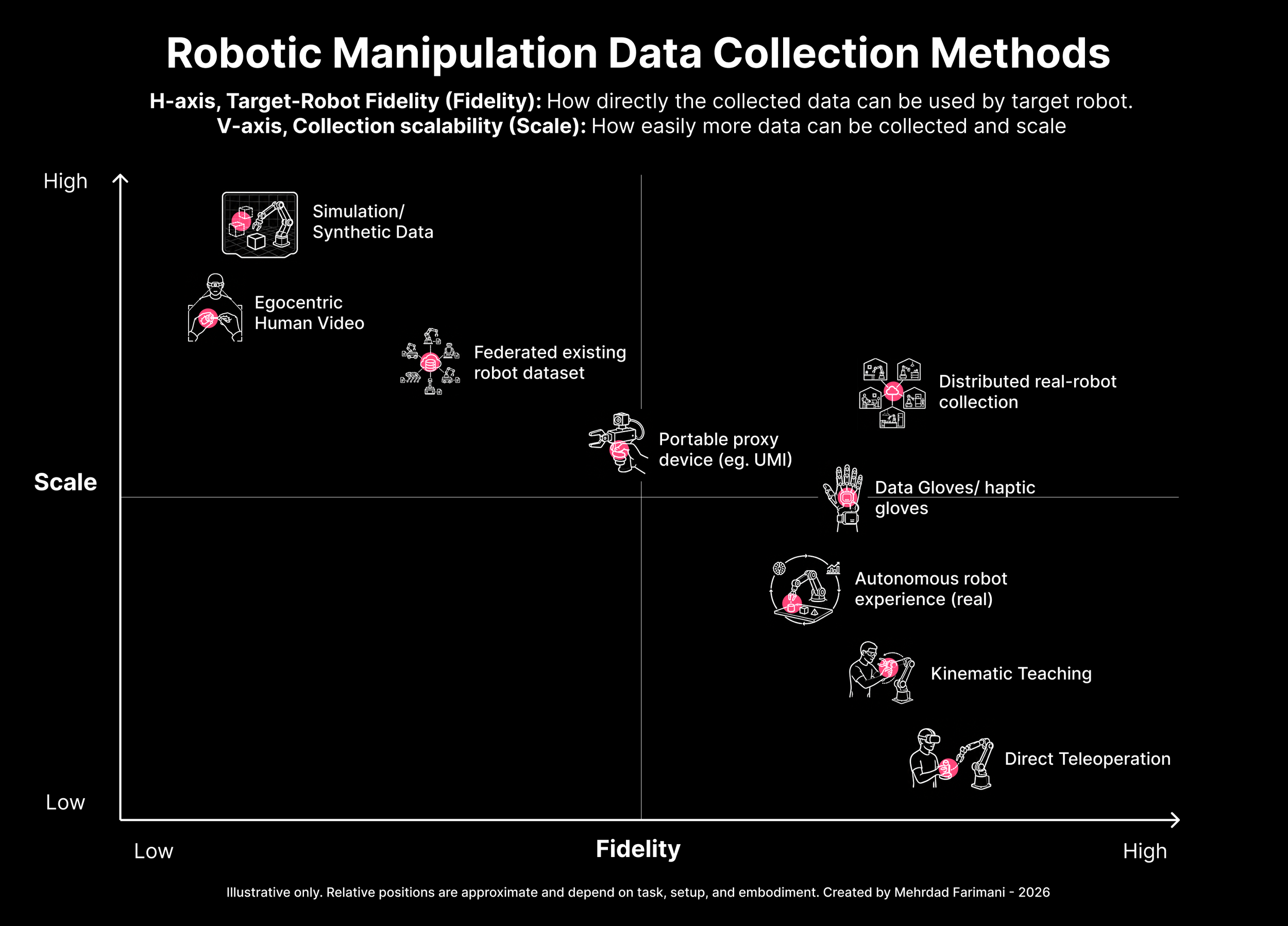
The State of Data Collection for Robotic Manipulation
During my years in humanoid robotics, I was not particularly focused on data collection methods and practices. However, over the past two years, several projects pushed me to look more closely at this area and connect it with my broader experience in robotics. More recently, I have encountered many newcomers and beginners who are curious about how manipulation data is actually collected, what the main approaches are, and why the topic has become so important. That made me realize there is a need for a beginner-friendly piece that is still as detailed and extensive as possible.
This article is my attempt to fill that gap. It covers the main ways manipulation data is collected including teleoperation, human demonstrations, portable devices, simulation, multi-robot datasets, tactile sensing, and autonomous robot experience. The goal is not only to describe these methods, but also to explain what each one captures well, what it misses, and where the trade-offs appear in practice.

Humanoids Can’t Get Too Far Without Softness
This piece is about a missing layer in humanoid design: softness. The hypothesis is simple. If humanoids are meant to work in environments built for humans, they cannot stay mostly rigid machines with hard panels. Human environments assume bodies that deform, absorb impact, create friction, and tolerate imperfect contact. Without that compliance, safety, usability, and generalization will remain much harder than they need to be.

The Highest Form of Robot Acceptance Is Being Ignored
My latest trip to Japan opened my eyes to something I have been thinking about for years: culture is not a side topic in robotics. It is infrastructure.
This text is not a research paper. It is an observation, mixed with years of working around robotics, designing robots, meeting robotics companies, and watching this strange industry try to grow up.
You do not see robots everywhere in Japan. That is not the point. In fact, if you go there expecting a Blade Runner city full of machines, you will probably be disappointed. The interesting part is more subtle. You feel that people have a sense of proximity to robots. They do not necessarily see them as magic. They also do not immediately see them as monsters.
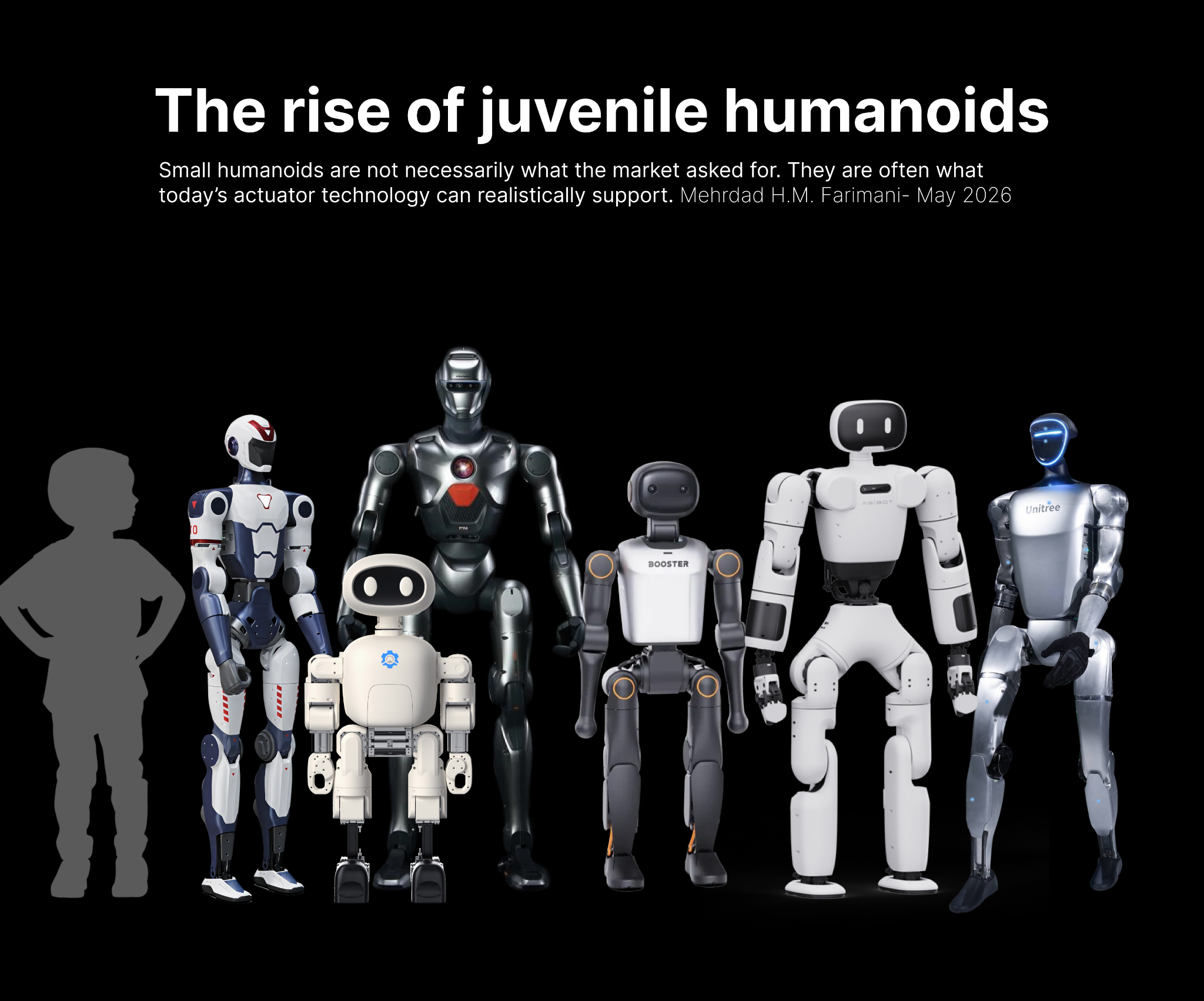
What’s the deal with all these juvenile humanoids?
I have been thinking a lot about the recent wave of small humanoid robots.
Not childlike robots designed for children. Not entertainment robots. Not toys. I mean the growing category of 120 to 140 cm humanoids that look like compressed versions of the future we are being promised.
And honestly, I think their best use case today is research.

Robotics Fails Where Humans Improvise
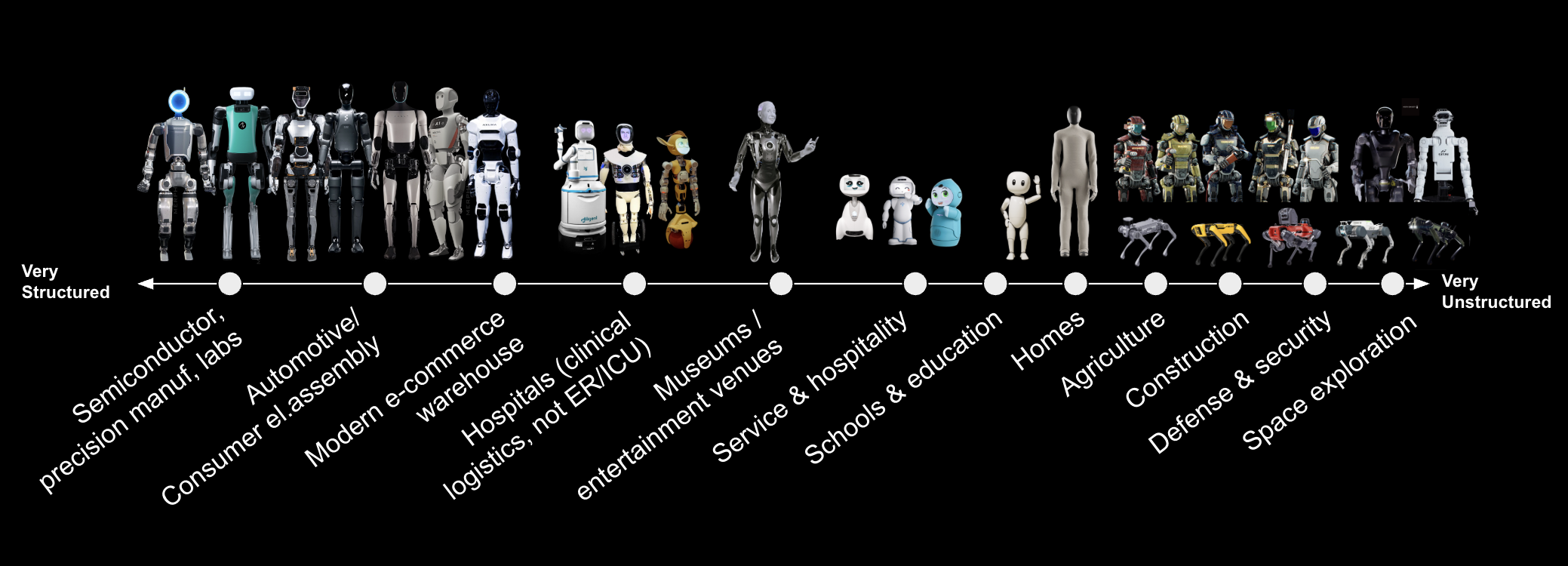
In this essay, I look at Moravec’s paradox at industry scale. My hypothesis is that robotics struggles most in industries where time has optimized the work around human improvisation instead of machine legibility.
Construction, mining, and agriculture may look simple from the outside. Move this. Drill that. Carry this. Inspect that. But the real work often lives in invisible judgment: reading the environment, adapting to bad information, sensing material behavior, recovering from small mistakes, and constantly repairing the task.
That is where robots struggle.
And it is also why robotics often succeeds faster in structured environments like factories and warehouses, where the world has already been simplified before the robot arrives.
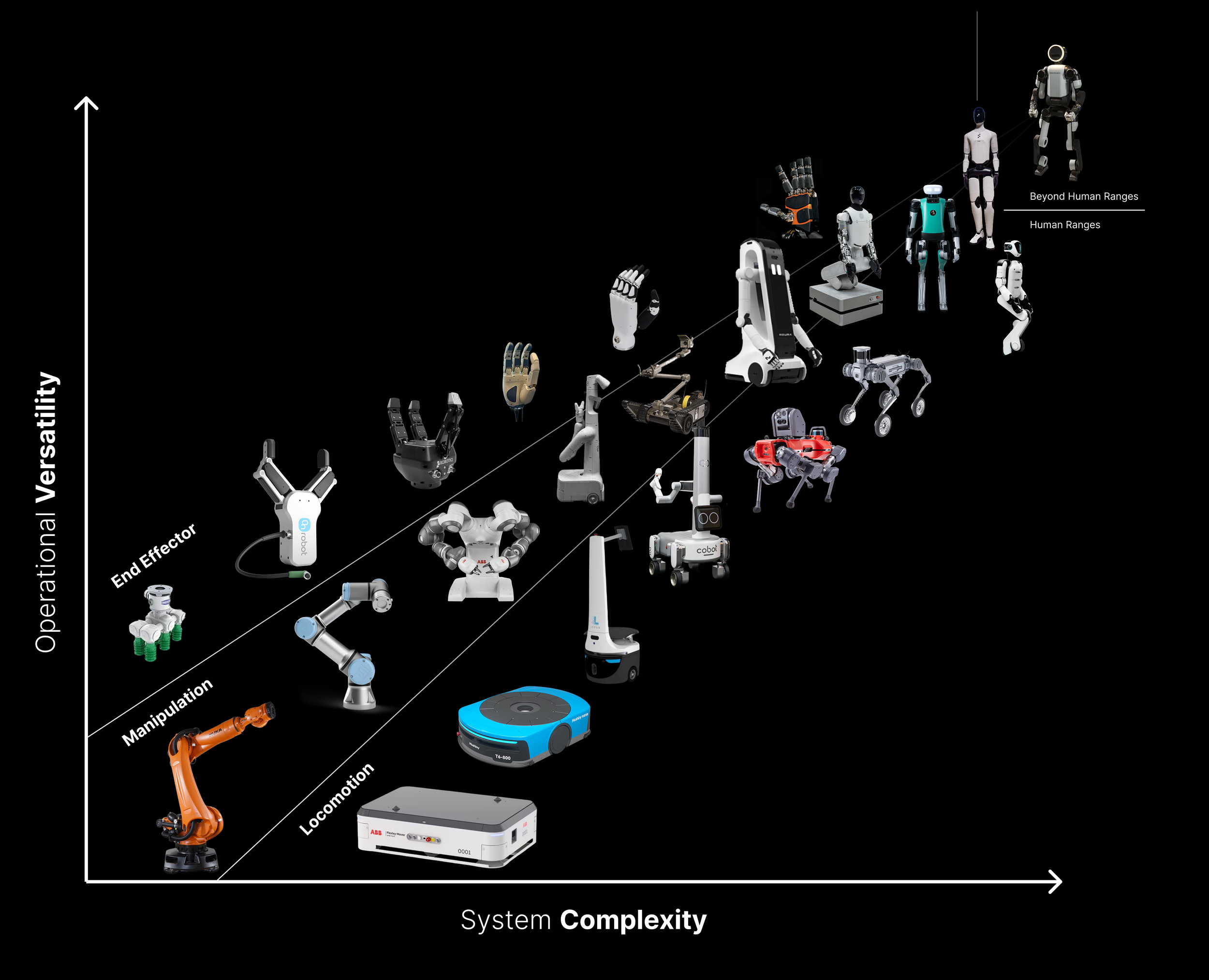
Robotics Complexity vs Versatility: Why Robots Are Converging
Robotics is moving from specialized machines to converged systems.
Classical robotics worked by narrowing the problem: industrial arms, AMRs, and grippers each solved specific tasks inside structured environments. The complexity did not disappear, it was pushed into fixtures, workcells, conveyors, safety systems, and process design.
Modern robotics is moving in the opposite direction. As robots are expected to operate in less structured environments, mobility, manipulation, grasping, perception, and autonomy are starting to merge into single integrated systems.
That convergence creates versatility, but it also brings a serious complexity tax.
The real question is not whether a robot is complex. It is whether that complexity turns into useful, reliable, and economically meaningful versatility.

Gen-AI Is Great at “A Thing”. Useless for “The Thing”
What is GenAI actually good at, and why it fails in areas such as robotics. Here I mostly focus on CAD GenAI and expand it to robotics shortly.
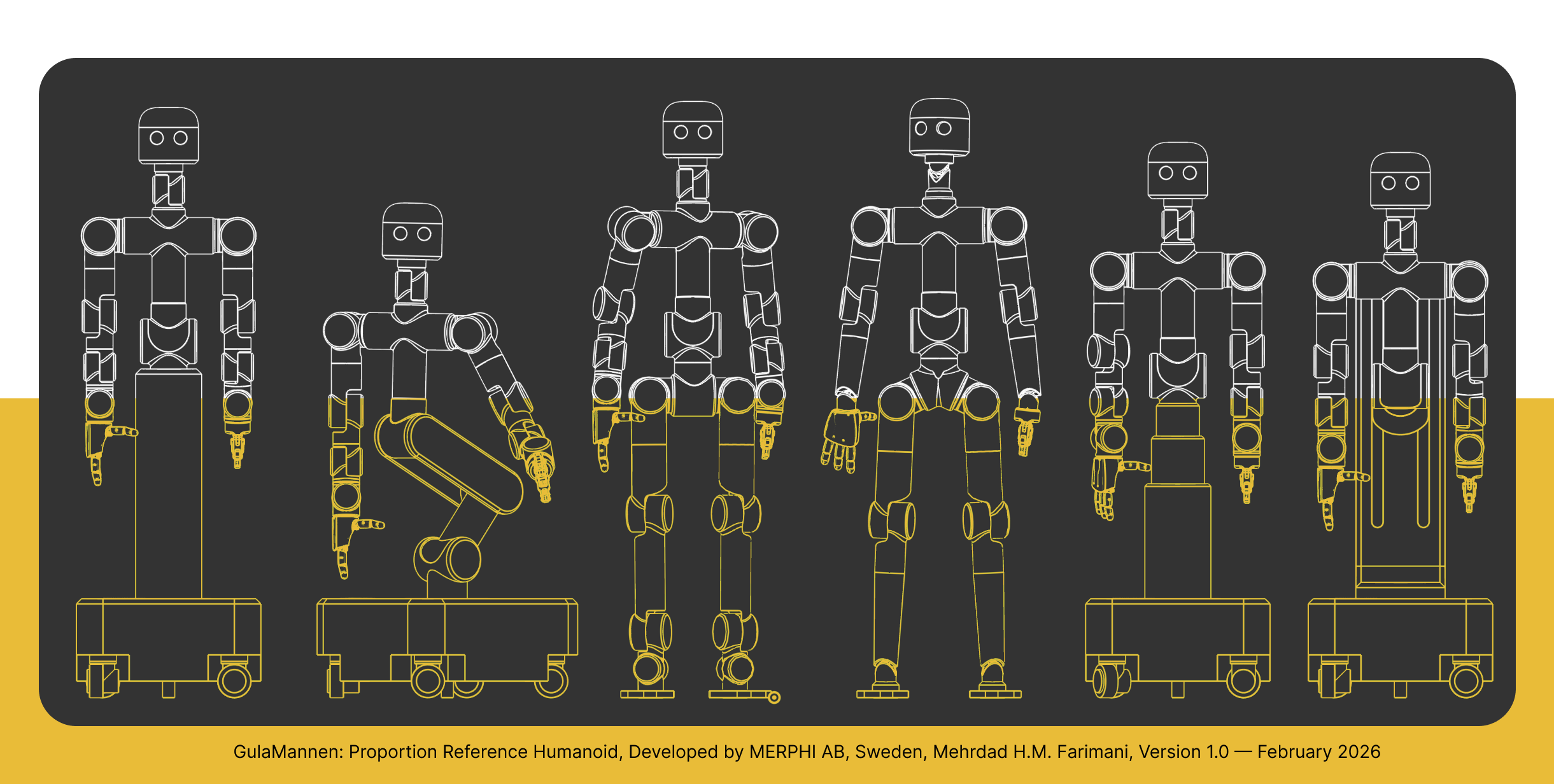
GulaMannen: A Modular Platform for Humanoid Robot Design and Simulation
GulaMannen: A Modular Platform for Humanoid Robot Design and Simulation

Things I’ve learned as a consultant to robotics companies.
You see things as a consultant that you simply don’t see otherwise. One fun one, maybe not: I often know when someone is about to quit or get fired before others do. Patterns are patterns.
Are robots going to replace people’s jobs? (Part 1)
Are robots going to replace people’s jobs?
It is a question that comes up again and again, usually framed as a near-term threat or a sudden breakthrough. From inside robotics, the picture looks very different.
Robots do not replace jobs. They replace tasks, and only under very specific conditions. Jobs are made of structured and unstructured work, responsibility, regulation, and accountability. Replacing execution is one thing. Replacing accountability is something else entirely.
In this piece, I break down why environment structure, task value, and system complexity matter more than intelligence headlines, and why humanoids are not a shortcut to job replacement.
Part 1 focuses on tasks, structure, and limitations. Part 2 will look at human-robot collaboration and what actually scales in the real world.

2025, year of robotics, in bullet points and visuals:
humanoid robots in 2025
The year is coming to its end, and it truly was an exciting one for robotics. Below are some of my observations, very much prone to be challenged. Anecdotal and non-structured, try to make sense of it yourself :)
We saw faster growth in humanoids than the previous year. The number of companies almost doubled, and the investment going into them increased a lot. As expected…

Standardization in Design: Are We There Yet?
Humanoid robot design hasn’t reached the standardization we see in other industries like mobile phones or cars. While industries mature and products become more uniform, robotics remains in a unique space. This blog explores why humanoid robots aren’t yet standardized, the factors behind this, and what this means for the future of robot design.

The Role of CMF in Humanoid Robot Design: Understanding Color, Material, and Finish
CMF (Color, Material, and Finish) is a critical factor in the design and branding of humanoid robots, shaping their emotional connection with users and enhancing their functionality. The choice of color can convey the robot's personality and influence how it is perceived in different contexts—whether as friendly, authoritative, or professional. By understanding how different colors impact user perception and robot identity, we can design robots that are both functional and emotionally engaging. This post delves into the significance of color in humanoid robot design, analyzing how colors influence the robot's purpose, user interaction, and brand identity.

Designing a Humanoid Robot: Considerations and Best Practices
As an industrial designer focused on the design and interaction of robots, I've spent the last 9 years designing various types of robots. By far, the most enjoyable and challenging projects have been humanoid robot designs. In this post, I’ll share some key tips for designers and roboticists navigating this exciting field.
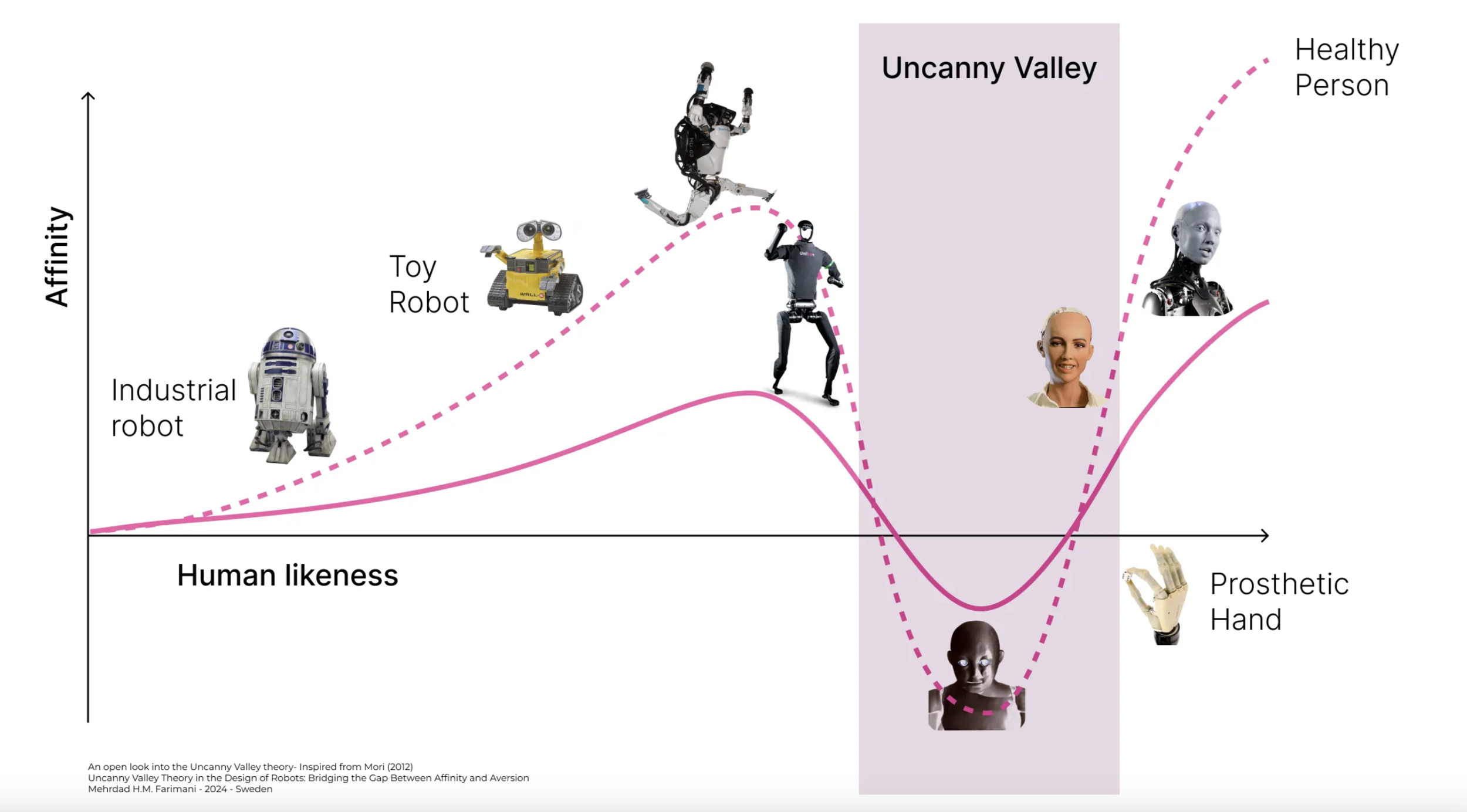
Navigating the Uncanny Valley in Humanoid Robot Design: Overcoming Eerie Imperfections
Explore the concept of the "Uncanny Valley" in humanoid robot design, a challenge where robots that resemble humans too closely but imperfectly cause discomfort. Learn about the factors contributing to this eerie feeling and discover design strategies to avoid it, ensuring robots are both functional and emotionally acceptable in various real-world applications.