
Robotics Fails Where Humans Improvise
Moravec’s paradox at industry scale
“Construction industry is the graveyard of robotics.”
I heard this quote somewhere. I do not remember exactly where, but it stayed with me.
My experience at my previous startup showed me something similar. Maybe not as dramatic as a graveyard, but close enough. I have had two years to reflect on why. Of course, besides my own shortcomings.
The obvious answers are easy to list.
Construction is fragmented. Margins are low. Every site is different. Decision-making is slow. Workers are already overloaded. The industry is conservative. The weather does not care about your roadmap. Dust gets everywhere. Nothing is where the drawing says it should be.
All true.
But I think there is a deeper reason. And it has to do with time.
The older an industry is, the more time humans have had to build practices, shortcuts, rituals, tools, tolerances, and workarounds around it.
That sounds like it should make the industry easier to automate.
But often it does the opposite.
Because those best practices were not built for robots. They were built for humans.
Over decades, sometimes centuries, people learned how to make messy physical work function through experience, judgment, and improvisation. The knowledge became distributed across bodies, habits, crews, tools, suppliers, site managers, and local culture.
So the industry may look primitive from the outside, but it is not simple. It is old enough that a lot of its intelligence has become invisible.
Construction is not hard for robots because it is primitive. It is hard because it is primitive in a very specific way.
It was never designed to be understood by machines.
A construction site is not a clean system. It is a constantly changing negotiation between humans, tools, materials, temporary structures, unfinished geometry, bad lighting, weather, noise, shortcuts, delays, and local improvisation.
For a human, this is normal.
For a robot, this is chaos.
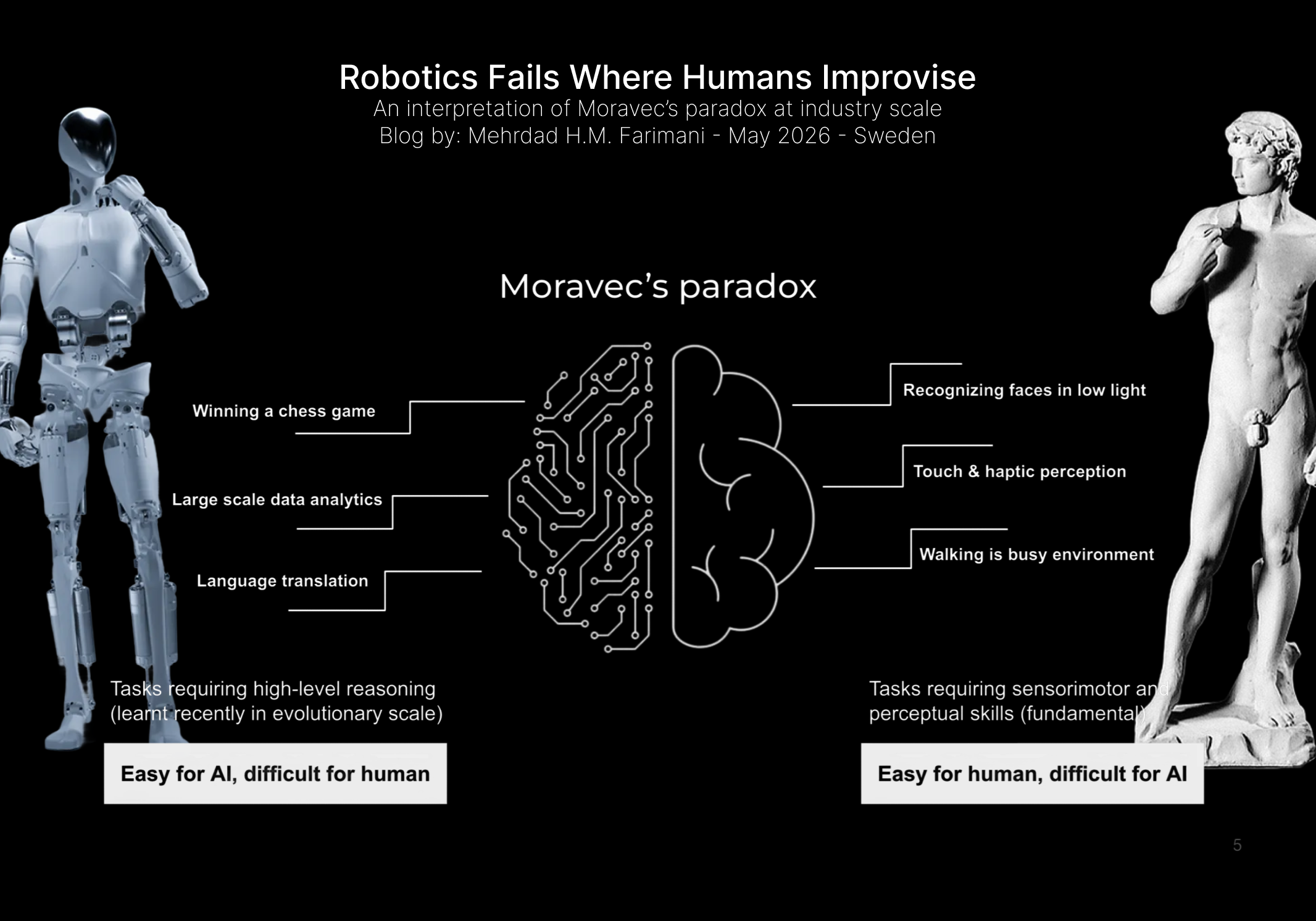
And this is where Moravec’s paradox becomes interesting again.
Most of us know the simple version of it:
What is hard for humans is often easy for computers. What is easy for humans is often hard for computers.
Chess, calculation, optimization, pattern recognition. Machines can be extremely good at these things.
Walking over rubble, picking up an unknown object, understanding a half-finished space, noticing that something “feels wrong,” adjusting your grip because the surface is dusty, stepping around a cable while carrying something heavy. Humans do this without thinking.
But that is exactly the trick.
We do not think about it because our bodies already solved most of it before our conscious mind gets involved.
A worker walking across a construction site is doing something computationally enormous. They are reading terrain, predicting other people, adjusting balance, interpreting materials, sensing risk, using peripheral vision, recovering from small mistakes, and applying years of embodied experience.
It looks simple because humans are the benchmark.
For a robot, it is not simple at all.
This is the part of Moravec’s paradox I find most interesting. Not only what is hard for robots, but why.
My hypothesis is this:
The older an industry is, the more of its intelligence is often hidden inside human practice.
And the more an industry depends on humans absorbing physical uncertainty, the harder it is to automate.
Or said differently:
Robotics struggles where time has optimized the industry around human improvisation instead of machine legibility.
This is why some industries seem to accept robots naturally, while others almost reject them.
Precision manufacturing is not easy. It is extremely technical. But the environment is usually controlled. The robot has a fixture. The part has a known position. The lighting is defined. The tolerance stack is managed. The process is repeated thousands or millions of times.
The world has already been simplified before the robot arrives.
Warehousing is also not easy, but it is more robot-friendly than construction. Items are barcoded. Routes can be mapped. Shelves can be standardized. Workflows can be redesigned. The environment is still messy in places, but it has a logic that machines can start to read.
Now compare that with construction.
The robot does not enter a finished system. It enters a half-built world.
The floor may not be flat. The map may be outdated. The object may not be where it should be. The task may only happen once. The site may change between morning and afternoon. People move through the space with their own goals. The weather changes the material behavior. A small mistake can be expensive, dangerous, or simply annoying enough that nobody wants the robot back tomorrow.
This is not just an automation problem.
It is an environment problem.
I think we often underestimate this in robotics. We talk too much about the robot and not enough about the world around it.
A robot is never just a machine. It is a machine plus an environment, plus a workflow, plus a business case, plus a failure mode.
If the environment is structured, the robot can be relatively dumb and still useful.
If the environment is unstructured, the robot has to become much smarter very quickly.
That is where the cost explodes.
This connects to something I wrote about in my previous blog: versatility versus complexity in robotics.
In a structured environment, a robot can win by being narrow.
It does one thing. It does it well. The world is arranged around that task. The business case is clear. The edge cases are limited. The robot does not need to understand everything. It just needs to perform inside a well-designed box.
That is why industrial robots worked so well in factories. Not because factories are simple, but because factories are structured.
In construction, mining, agriculture, and many other older industries, the box is broken.
Or maybe there was never a box.
The robot is asked to become versatile almost immediately. It needs mobility, perception, manipulation, planning, recovery behavior, safety logic, and some kind of common sense. It has to deal with uneven ground, unknown objects, changing geometry, different materials, humans, dust, vibration, lighting changes, missing information, and tasks that do not repeat in exactly the same way.
Every extra layer of versatility adds complexity.
And complexity compounds.
It is not just “add better perception.”
Better perception creates better data, but then the robot needs to decide what to do with it. Better mobility helps the robot reach more places, but now it faces more terrain variation. Better manipulation lets it touch more things, but now it needs to understand material behavior, object uncertainty, and failure recovery.
A robot that only observes can survive in a messy world.
A robot that acts in a messy world has a much harder problem.
This is why inspection, scanning, mapping, layout, and monitoring are often easier entry points than full physical automation.
They reduce the action burden.
A drone can scan a site without moving materials. A mobile robot can collect data without changing the building. A layout robot can mark the floor without taking responsibility for the whole construction process.
These are useful wedges because they respect the complexity of the environment.
They do not pretend that the whole site can be automated in one step.
And this is where I think many robotics startups, including mine in the past, can get trapped.
We look at a human doing a task and think: “That looks automatable.”
But we are not seeing the full task.
We see the visible action. We do not see the invisible judgment around it.
A human worker does not just perform the task. They constantly repair the task.
They fix missing information. They interpret unclear instructions. They compensate for bad tools. They notice when the environment has changed. They work around other people. They make small decisions that nobody wrote down.
That invisible layer is often the real job.
And robots are bad at invisible jobs.
This is why “primitive” industries can be so deceptive.
From the outside, construction or mining can look physically simple. Move this. Drill that. Inspect this. Carry that. Dig there.
But the simplicity is misleading.
These industries have had a very long time to evolve. Not into clean digital systems, but into human systems. Systems where people know what to ignore, what to fix, what to feel, what to question, and when to break the official process to get the real work done.
The process may be old, but the environment is not simple. It is just not formalized. It lives in people’s bodies, habits, and local knowledge.
So maybe the better word is not primitive.
Maybe the better word is pre-machine-legible.
These industries evolved before robots, sensors, digital twins, and closed-loop automation. They were built around human eyes, human hands, human balance, and human improvisation.
That makes them impressive.
But it also makes them hostile to robots.
This does not mean old industries cannot be automated. I do not believe that.
Actually, I think some of the biggest opportunities in robotics are exactly in these messy, old, physical industries.
But the path is different.
The mistake is to assume that we can simply drop robots into the old workflow and expect them to perform like junior humans.
That almost never works.
The better strategy is usually to reshape part of the environment around the robot.
Not all of it. Just enough.
Prefab construction is one example. Move more of the work into a controlled environment and suddenly robotics becomes more realistic.
Autonomous haulage in mining is another example. The whole mine is not automated, but specific routes and operations can be structured enough for autonomy.
Warehouses became more robot-friendly not only because robots improved, but because workflows, inventory systems, and physical layouts were redesigned around automation.
This is the important lesson:
Robotics succeeds when the technology and the environment evolve together.
It is rarely just about building a smarter robot.
Sometimes the smartest move is to make the world slightly easier for the robot to understand.
This may sound less exciting than full autonomy, but it is usually more practical.
A robot does not need to solve the entire chaos of construction to create value. It needs to find a narrow slice where the environment can be bounded, the task can be repeated, the failure can be detected, and the business case is painful enough.
That is the wedge.
Then it can expand.
This is also where the human role becommes more interesting.
I do not think the near future of robotics in these industries is humans versus robots.
It is humans absorbing lessnonsense.
Let robots do the parts that can be structured. Let humans handle the parts that still require judgment, negotiation, and improvisation. Over time, as the environment becomes more digital, more measured, and more machine-readable, the robot can take on more.
But the order matters.
First structure.
Then autonomy.
Not the other way around.
This is the part that many people in robotics do not want to hear. Especially when the demo looks good.
A demo can hide environmental complexity.
A business cannot.
A robot demo usually shows the task when everything is prepared for success. The real world shows the task when something is missing, wet, late, bent, dusty, blocked, badly labeled, or slightly different from yesterday.
That is where robotics companies die.
Not in the task.
In the edge cases around the task.
So if we want to understand where robotics will succeed, we should stop asking only: “Can a robot do this?”
The better questions are:
How much does the environment change?
How often does the task repeat?
Can the workflow be redesigned?
What happens when the robot fails?
How much invisible human judgment is currently holding the process together?
Is the value in full autonomy, or in removing one painful layer of human work?
These questions matter more than the industry label.
A new industry can still be hard if the environment is chaotic.
An old industry can become easier if the right part of it is standardized.
So my original hypothesis needs a small correction.
It is not simply that old industries are harder to automate.
It is that old industries have had more time to become optimized around human adaptability.
And human adaptability is exactly the thing robots struggle to replace.
That is Moravec’s paradox at industry scale.
The industries that look physically simple often contain the deepest form of intelligence: embodied intelligence.
The kind that does not live in a spreadsheet.
The kind that does not show up in a process diagram.
The kind that happens when a person walks into a messy environment and still gets the job done.
This is why construction has been such a graveyard for robotics.
Not because there is no opportunity.
Because the opportunity is buried under the oldest and hardest problem in robotics:
Reality is messy.
Humans are good at messy.
Robots are still learning.
Cheers