
Robotics Complexity vs Versatility: Why Robots Are Converging
There is a useful way to look at robotics that does not start with hype, AI, or humanoids.
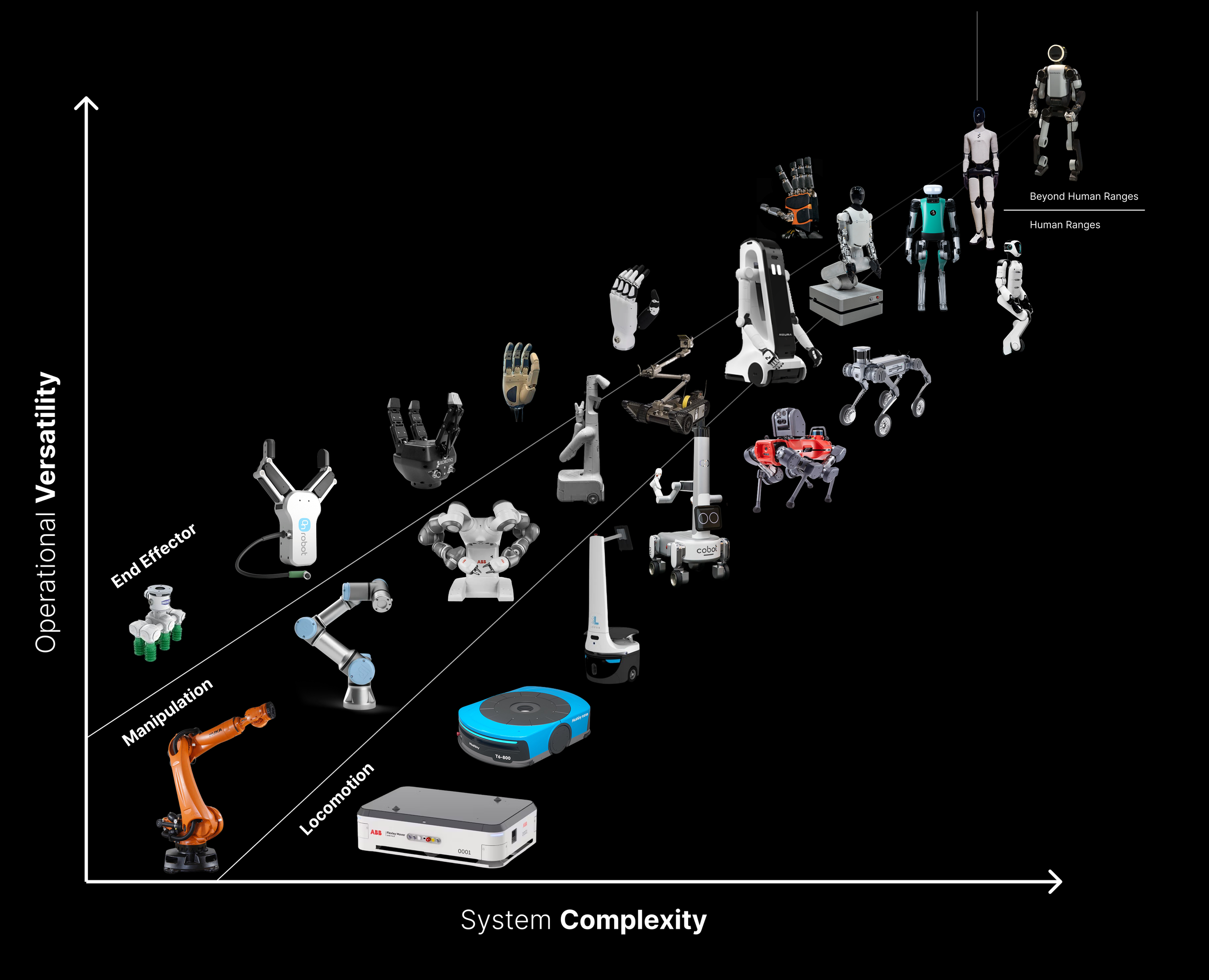
Operational versatility vs system complexity in robotics
It starts with a simple question:
How much complexity are we willing to accept in order to gain versatility?
A fixed industrial robot arm sits on one side of this discussion. It is not simple in an absolute sense, but compared to a humanoid robot, it is relatively contained. It has a fixed base, defined kinematics, a known workspace, and usually one clear task.
Give it the right fixture, the right end effector, the right safety setup, and the right motion path, and it can perform extremely well.
A humanoid robot sits on the other side.
It needs mobility, balance, manipulation, perception, task planning, whole-body coordination, human-scale interaction, and some level of autonomy. It is massively more complex. But the promise is also much larger: one robotic system that can operate across many tasks, spaces, and workflows without rebuilding the environment around it.
So the question is not whether complexity is good or bad.
The better question is:
Does the added complexity create enough real-world versatility to justify itself?
Industrial robots work because the world is structured
Classical robotics succeeded by narrowing the problem.
Industrial automation did not try to build robots that could understand the messy real world. Instead, it structured the environment.
Parts came in known orientations. Fixtures held objects in place. Conveyors moved things predictably. Safety systems separated humans from machines. Lighting, timing, tooling, and process flow were all controlled.
In other words, the robot did not need to be versatile because the world around it was made simple.
This is why industrial robot arms are so effective. They do not need general intelligence. They solve a specific physical task in a controlled environment, over and over again, with high repeatability.
That is not a weakness.
That is the entire point.
If the task is stable, specialization wins.
The complexity did not disappearr
It is easy to look at an industrial arm and say: “That is a simpler robot.”
But the full robotic system is not just the arm.
It includes the robot, gripper, fixtures, safety system, cell layout, conveyors, PLCs, programming, part presentation, and process engineering.
So yes, the robot itself may be relatively contained. But a lot of complexity has simply been moved outside the robot and into the environment.
That gives us one of the key ideas:
Specialized robots externalize complexity into the environment. Versatile robots internalize complexity into the machine.
A classical robot survives because the world is simplified for it.
A modern versatile robot is expected to survive because it can handle more of the world as it is.
Robotics complexity vs robot versatility
You can think of robotic systems on two axes. (Image above)
One axis is system complexity: mechanical degrees of freedom, sensors, actuators, controls, software layers, safety systems, perception, autonomy, interfaces, and failure modes.
The other axis is operational versatility: how many useful tasks the robot can perform, across how many environments, with how little redesign or reintegration.
A simple gripper is low complexity and low versatility.
An industrial arm is more complex, but still limited to a defined task and workspace.
An AMR is mobile, but often limited in manipulation.
A mobile manipulator adds versatility, but also more integration problems.
A humanoid robot pushes the model further: mobility, manipulation, perception, dexterity, and human-environment compatibility in one system.
The pattern is clear:
The more unstructured the environment becomes, the more complexity the robot needs to carry internally.
That does not mean every complex robot is useful. Many are not.
It means complexity becomes more justifiable when the robot is expected to work in less structured conditions.
Classical robotics was divergent
Classical robotics did not only simplify the environment. It also split robotic capability into separate product categories.
You had:
Manipulators
Industrial arms, SCARAs, delta robots, gantries.
Mobile platforms
AGVs, AMRs, carts, logistics robots.
End effectors
Simple grippers, suction cups, welding torches, tools, custom fixtures.
Each category solved one part of the problem.
The manipulator moved the tool.
The mobile platform moved the payload or the base.
The end effector interacted with the object.
This was a divergent model. Capability was decomposed into specialized modules. Each product category could be optimized independently, then integrated into a structured process.
It worked very well for narrow tasks.
But it also created a limitation: the system was only as flexible as the integration around it.
Change the object, workflow, workspace, or task, and the whole system may need redesign.
Modern robotics is convergent
Modern robotics is moving in the opposite direction.
As target environments become less structured and task definitions become broader, once-separate robot categories start to merge.
A fixed industrial arm becomes a single arm on an AMR.
A mobile platform becomes a mobile manipulator.
A single-arm system becomes bimanual.
A fixed bimanual system becomes mobile.
A simple gripper becomes an adaptive gripper.
An adaptive gripper becomes a dexterous robotic hand.
A quadruped gets an arm.
A wheeled base gets a humanoid upper body.
A humanoid gets hands, whole-body control, perception, and task-level autonomy.
Eventually, manipulation, mobility, grasping, perception, and planning are no longer separate products. They become one embodied robotic system.
That is convergence.
And it is not happening because humanoids are fashionable. It is happening because versatility in real environments requires multiple capabilities to work together.
Mobility alone is not enough.
Manipulation alone is not enough.
A clever end effector alone is not enough.
The value appears when these systems are integrated well enough to perform useful work in a world that was not perfectly prepared for them.
The convergence tax
But convergence is expensive.
A mobile base with an arm is not just an AMR plus an arm. The arm changes the center of gravity. The base affects manipulation accuracy. Navigation affects reachability. Payload affects stability. Perception has to support both movement and manipulation. Safety becomes harder because the robot is now moving and physically interacting with the environment.
A humanoid robot multiplies this further.
Legs affect manipulation.
Hands affect task planning.
Vision affects locomotion.
Balance affects reach.
Battery affects everything.
Software failures become physical failures.
Mechanical design becomes system design.
This is why convergence is not just a product strategy. It is a systems engineering problem.
The more capabilities you combine, the more the robot becomes a dense knot of dependencies.
That is the cost.
The payoff is versatility.
The practical conclusion
The real movement in robotics is not simply from “simple robots” to “advanced robots.”
That framing is too shallow.
The better framing is:
Divergent, specialized systems in structured environments
to
convergent, integrated systems in less structured environments
Classic robotics solved narrow tasks by distributing capability across separate machines, tools, fixtures, and controlled environments.
Modern robotics is trying to pull more of that capability into the robot itself.
That increases versatility.
It also increases internal complexity.
This is why humanoid robots are so interesting, and also why they are so difficult.
They represent the extreme end of convergence: mobility, manipulation, dexterity, perception, autonomy, and human-environment compatibility in one platform.
The bet is that one complex platform can eventually serve many tasks.
That bet only works if the versatility is real.
Not demo versatility.
Not YouTube versatility.
Not “it worked once in a lab” versatility.
Actual usable versatility.
The kind that survives cost, uptime, maintenance, safety, deployment, and boring operational reality.
Closing thought
A robot does not become valuable because it is complex.
A robot becomes valuable when its complexity is converted into useful, reliable, and economically meaningful versatility.
In a structured factory cell, an industrial robot arm may still be the best answer. It is focused, repeatable, mature, and economically clear.
In a messy human environment, a more integrated robotic system may be justified because the cost of structuring the world becomes too high, too slow, or impossible.
So the question is not:
“Will humanoid robots replace industrial robots?”
The better question is:
Where should the complexity live?
Should it live in the environment, through fixtures, process design, and dedicated automation?
Or should it live inside the robot, through perception, mobility, manipulation, dexterity, and autonomy?
Classical robotics put more complexity into the environment.
Modern robotics is trying to put more complexity into the robot.
That is the shift.
Robotics is moving from divergence to convergence. That shift gives us more versatility, but it comes with a serious complexity tax.
The future of robotics will not be decided by which robot looks the most advanced. It will be decided by which systems can justify their complexity through real-world usefulness.
Because complexity alone is just burden.
Versatility is the prize.
Cheers guys!