
GulaMannen: A Modular Platform for Humanoid Robot Design and Simulation
A recurring problem in humanoid robot design
In many humanoid robotics projects, early design decisions are based on human proportions or inspiration from existing robots. These assumptions often break later when the system is tested in simulation or evaluated against real tasks.
At that point, teams face issues such as:
Limited reach or incorrect workspace coverage
Inconsistent joint limits
Poor actuator distribution
Mismatch between mechanical design and control requirements
This leads to repeated redesign cycles and misalignment between mechanical, control, and AI teams.
This problem sits at the intersection of humanoid robot design, robot simulation, and robotics engineering workflows.
A simulation-first approach to humanoid robotics
GulaMannen is a modular humanoid robot design platform built to support simulation-first development.
Instead of starting from scratch or adapting an existing humanoid, the platform provides a structured reference model that can be used directly in simulation environments such as Isaac Sim, Mujoco, Gazebo, or PyBullet.
It allows teams to evaluate:
Humanoid proportions and limb dimensions
Joint architectures (serial vs parallel)
Actuator sizing and distribution
Workspace reach and task compatibility
Different base configurations (biped and hybrid systems)
The goal is to move critical design decisions earlier in the pipeline, where they are cheaper and easier to change.
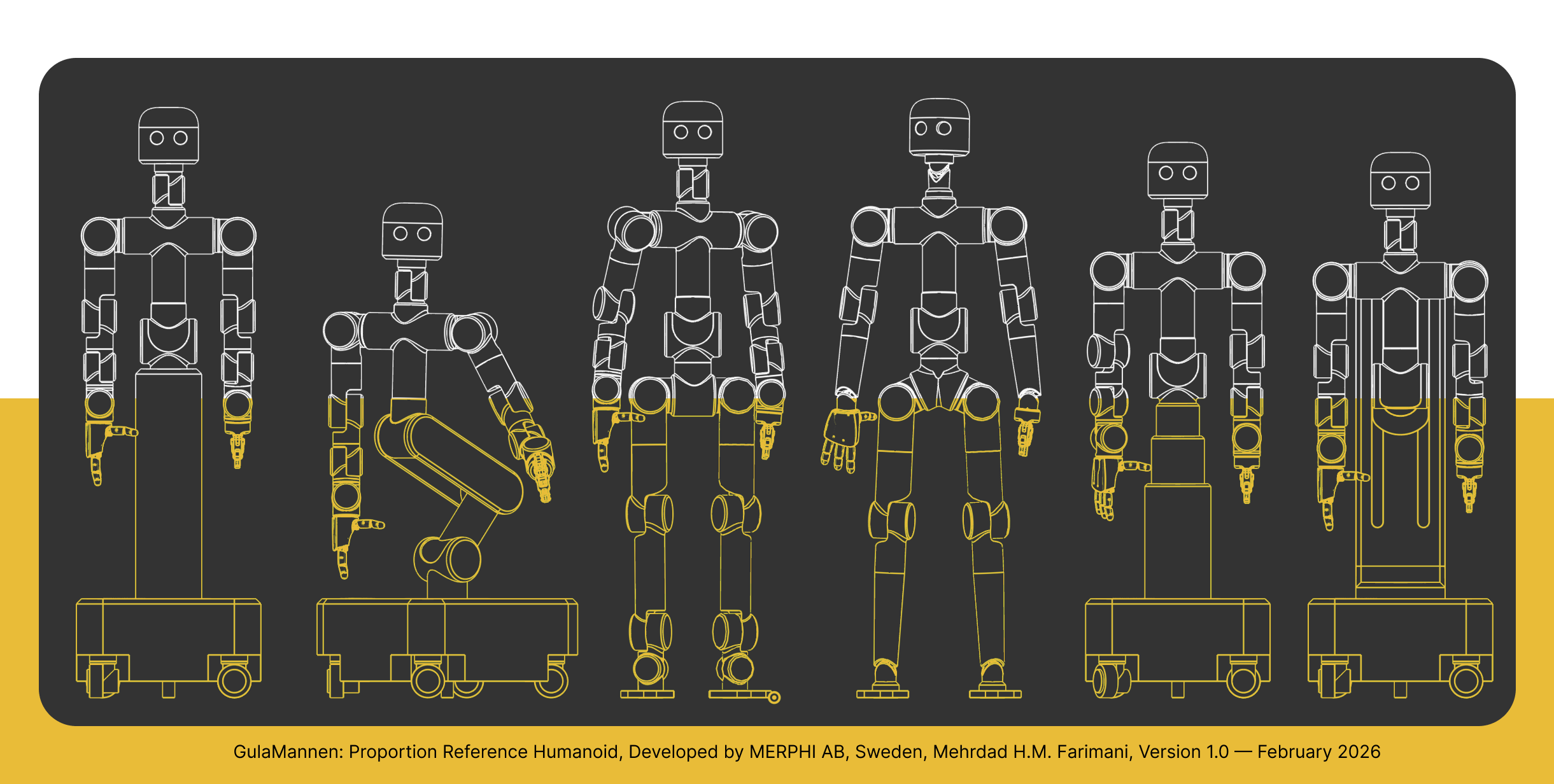
Six reference humanoid configuration
The platform includes six predefined humanoid robot configurations, each representing a different design approach.
1. Series biped humanoid
A full humanoid robot with serial joint architecture.
Relevant for:
Locomotion research
Whole-body control
Baseline humanoid simulatio
2. Parallel wrist and ankle humanoid
A humanoid configuration with parallel joint structures at the wrist and ankle.
Relevant for:
Compact joint packaging
Alternative kinematic structures
3. Pedestal-mounted humanoid robot
Upper body mounted on a fixed base.
Relevant for:
Manipulation tasks
Industrial workstation simulation
4. Vertical linear actuator humanoid
Humanoid mounted on a vertically adjustable column.
Relevant for:
Shelf interaction
Variable height and reach workspaces
Industrial pallet and box reach
Etc.
5. Single-leg hybrid humanoid
A simplified lower body with limited degrees of freedom.
Relevant for:
Reduced complexity systems
Early-stage manipulation development
6. Rail-based humanoid platform
Upper body mounted on a vertical rail system.
Relevant for:
Structured environments
Vertical service robotics
Modular humanoid architecture
A key aspect of GulaMannen is its modular robot design.
Instead of fixed geometry, the system allows interchangeable subsystems:
Wrist and ankle (serial or parallel architectures)
Hip configurations (horizontal or angled PRY joints)
Neck configurations
Base types (biped, pedestal, linear actuator, rail system)
This modularity allows engineers to explore multiple humanoid configurations without rebuilding the entire robot.
Evaluating humanoids in real task environments
Simulation without context often leads to misleading conclusions.
GulaMannen includes reference environments to support realistic evaluation:
Desk and workstation layouts
Industrial pallet and box dimensions
Shelf configurations
These environments enable testing of:
Reach envelopes
Task feasibility
Interaction constraints
This connects robot kinematics with real-world use cases.
CAD and URDF workflow for robotics simulation
The platform is built using Onshape CAD, which serves as the source of truth
Typical workflow:
Access the public Onshape document
Copy and modify the model
Export geometry or URDF
Import into simulation tools
URDF is partially available and supports integration with:
Isaac Sim (validated)
Mujoco
Gazebo
PyBullet
Webots
Mass properties and dynamics are partially defined and should be refined for advanced simulation.
A reference model for humanoid robotics
Many robotics teams use existing humanoid robots as informal references. While practical, this approach introduces hidden constraints tied to specific actuator choices and design decisions.
GulaMannen aims to provide a more neutral humanoid reference model.
A useful comparison is a crash test dummy. It is not the final product, but a consistent structure for evaluation.
Similarly, this platform is intended to:
Reduce bias in early design decisions
Standardize initial humanoid configurations
Improve consistency across teams
Open-source humanoid robotics platform
GulaMannen is an open and evolving project.
Current limitations:
Inertial properties are partially defined
Dynamics are not fully validated
URDF coverage is incomplet
The platform is open for use, modification, and extension by the robotics community.
This includes contributions in:
Humanoid URDF development
Simulation validation
New configurations
Robotics scenario design
Credits
Developed by MERPHI AB (Sweden)
Lead creator: Mehrdad Hossein Morvaridi Farimani
With early feedback from Ben Katz (MIT), Scott Walter, Connor Shannon, Steve Morfey, and others.
Special thanks to Kimate Richards for URDF support.
Access the humanoid robot platform
Explore the repository, CAD models, and simulation assets:
https://github.com/mehrdad-Farimani/gulamannen-reference-humanoids
Closing
Humanoid robotics is still in an early phase where many foundational decisions are repeated across teams.
A shared reference platform does not eliminate complexity, but it can reduce unnecessary iteration at the stage where most uncertainty exists.
That is where GulaMannen is positioned.